Сенсорна механічна боротьба з внутрішньорядними бур’янами за допомогою моторизованих пальчикових культиваторів (частина 1)

Із моменту впровадження гербіцидів у середині 20 століття вони замінили більшість методів боротьби з бур’янами. Однак через поєднання правових обмежень, суспільного попиту, стійкості до гербіцидів та екологічних проблем, а також постійного інтересу з боку органічного землеробства, механічна боротьба з бур’янами знову стає ефективною альтернативою застосуванню синтетичних гербіцидів.
За матеріалами статті на тему «Сенсорна механічна боротьба з внутрішньорядними бур’янами цукрових буряків за допомогою моторизованих пальчикових культиваторів» («Sensor-Based Intrarow Mechanical Weed Control in Sugar Beets with Motorized Finger Weeders») журналу «Агрономія» («Agonomy»), 11, 2021 р.
Протягом останніх років швидко розвивалися нові механічні інструменти для прополки та точні техніки рульового керування. Зокрема, поєднання вже існуючих знарядь механічної прополки з різноманітними сенсорними системами дозволило збільшити їх використання на орних культурах. Наприклад, на ринку широко доступні культиватори з камерою наведення від різних виробників. Їхня концепція наведення заснована на камері, яка відстежує посівні рядки та посилає сигнал до гідравлічного циліндра, який зміщує культиватор вліво або вправо, щоб залишатися на одній лінії з посівними рядками.
До переваг таких систем можна віднести зниження втоми водія, можливість видалення бур’янів максимально близько до посівного рядка, що збільшує оброблювану площу, а також можливість збільшення робочої швидкості. При густоті бур'янів від 15 до 150 шт./м2 повідомлялося, що за допомогою культиватора з камерою наведення їх густоту можна зменшити на 87% на цукрових буряках (Beta vulgaris) і на 89% на соєвих бобах. Це зменшення бур’янів було досягнуто навіть при робочій швидкості від 7 до 10 км/год., тоді як урожайність була подібною до внесення гербіцидів.
Залежно від цільової області застосування механічні методи боротьби з бур’янами можна розділити на внутрішньорядні та міжрядні. Внутрішньорядна площа – це невелика смуга самих посівних рядків, а міжрядна – це простір між двома сусідніми посівними рядками. На сьогоднішній день післясходову міжрядну прополку можна ефективно виконувати на широких міжряддях просапних культур без надмірного пошкодження посівів; однак видалення бур’янів всередині посівних рядків залишається складним завданням. Тому було розроблено безліч різних засобів для фізичної боротьби з бур’янами всередині посівних рядків.
Сюди входять пальчикові культиватори, культиватори торсійного типу, сенсорне прополювання та щітки для прополки. Пальчикові культиватори виявилися досить успішними, але їх краще використовувати на пізніх стадіях росту рослин, так як вони потребують більш зрілої стадії росту та розвитку коренів культури, порівняно з бур’янами. Незважаючи на можливість збільшення інтенсивності звичайного прополювання за допомогою використання пальчикових культиваторів із твердішої гуми та охоплення більшої площі в посівному рядку, за допомогою цих пальчикових культиваторів можна видаляти лише дрібні бур’яни.
Сенсорне прополювання можна виконувати всередині посівного рядка. Зараз розробляється багато подібних систем; однак їх вартість і повільна швидкість залишаються обмежуючими факторами. Щітки для прополки призначені для викорчовування дрібних бур’янів, але вони вимагають оптимальних ґрунтових умов, а також стадій росту бур’янів та основної культури.
 У ході автоматизації збільшився інтерес до механічної боротьби з бур’янами на орних культурах у поєднанні з сільськогосподарськими роботами. Bosch Deepfield Robotics розробила BoniRob — досить великий сільськогосподарський робот, який може в автоматичному режимі виявляти бур'яни та знищувати їх, повертаючи на своє місце ударами залізного «кулака» і витрачаючи на один бур'ян біля однієї десятої долі секунди. Роботи також були успішно випробувані для викорінення Rumex obtusifolius (щавель туполистий) на пасовищах. AgBot II поєднує механічні та хімічні способи боротьби з бур’янами, а комбінація термічних та механічних інструментів була оцінена на прикладі роботів RHEA в Іспанії. Проте, ще є можливість вдосконалити дизайн та налаштування інструментів для механічної боротьби з бур’янами за допомогою роботів.
У ході автоматизації збільшився інтерес до механічної боротьби з бур’янами на орних культурах у поєднанні з сільськогосподарськими роботами. Bosch Deepfield Robotics розробила BoniRob — досить великий сільськогосподарський робот, який може в автоматичному режимі виявляти бур'яни та знищувати їх, повертаючи на своє місце ударами залізного «кулака» і витрачаючи на один бур'ян біля однієї десятої долі секунди. Роботи також були успішно випробувані для викорінення Rumex obtusifolius (щавель туполистий) на пасовищах. AgBot II поєднує механічні та хімічні способи боротьби з бур’янами, а комбінація термічних та механічних інструментів була оцінена на прикладі роботів RHEA в Іспанії. Проте, ще є можливість вдосконалити дизайн та налаштування інструментів для механічної боротьби з бур’янами за допомогою роботів.


У даному дослідженні досліджувався новий підхід до механічної прополки цукрових буряків. Цукрові буряки не дуже конкурентоспроможні з бур’янами, тому їх необхідно утримувати у чистому від бур’янів стані до самого змикання рядків. У Німеччині для ефективної боротьби з бур’янами цукрових буряків зазвичай необхідно два-три внесення гербіцидів після появи сходів. Механічна прополка проводиться нечасто через високий ризик зараження бур’янами, якщо обробку не проводити вчасно та належним чином. Бур’яни, зокрема, всередині рядків видаляються досить складно, оскільки цукрові буряки є чутливими рослинами, які погано переносять фізичні навантаження. Тому було розроблено систему візуалізації, яка визначає положення цукрових буряків для внутрішньорядного механічного прополювання бур’янів за допомогою моторизованого пальчикового культиватора.
Моторизований пальчиковий культиватор заснований на звичайному пальчиковому культиваторі, оснащеному електродвигуном, що дозволило швидко змінювати обертальний рух пальчикового культиватора незалежно від швидкості руху трактора. Система була інтегрована у звичайну систему міжрядного обробітку просапних культур із налаштуванням камери.
Ми припустили, що (а) моторизований пальчиковий культиватор підвищує ефективність боротьби з бур’янами, порівняно зі звичайним пальчиковим культиватором, особливо на внутрішньорядній ділянці, і що (b) моторизовані пальчикові культиватори не мають негативного впливу на врожайність цукрових буряків, порівняно зі звичайними пальчиковими культиваторами. Крім того, комбінація міжрядної та внутрішньорядної механічної прополки забезпечила однакову ефективність видалення бур’янів при застосуванні гербіцидів на всіх ділянках.
Матеріали та методи
Огляд та експериментальна ділянка
Польові дослідження внутрішньорядної механічної боротьби з бур’янами проводилися на посівах цукрових буряків у 2017 та 2018 роках. Експеримент проводився на експериментальній ділянці Ihinger Hof (Реннінген, Південно-Західна Німеччина) і складався з восьми різних обробок. Експериментальна ділянка Ihinger Hof знаходиться на висоті 475 м над рівнем моря із середньою кількістю опадів 738 мм за довготривалий період. Загальна річна кількість опадів становила 654 мм у 2017 році та 526 мм у 2018 році.
Весняні та літні опади можна побачити в Таблиці 1. Механічні методи боротьби з бур’янами за допомогою моторизованого пальчикового культиватора (MFW) порівнювалися з необробленими посівами, звичайним внесенням гербіцидів та звичайним пальчиковим культиватором (CFW).
Таблиця 1. Кількість опадів у мм за період із березня по вересень у 2017 та 2018 роках на експериментальній ділянці Ihinger Hof

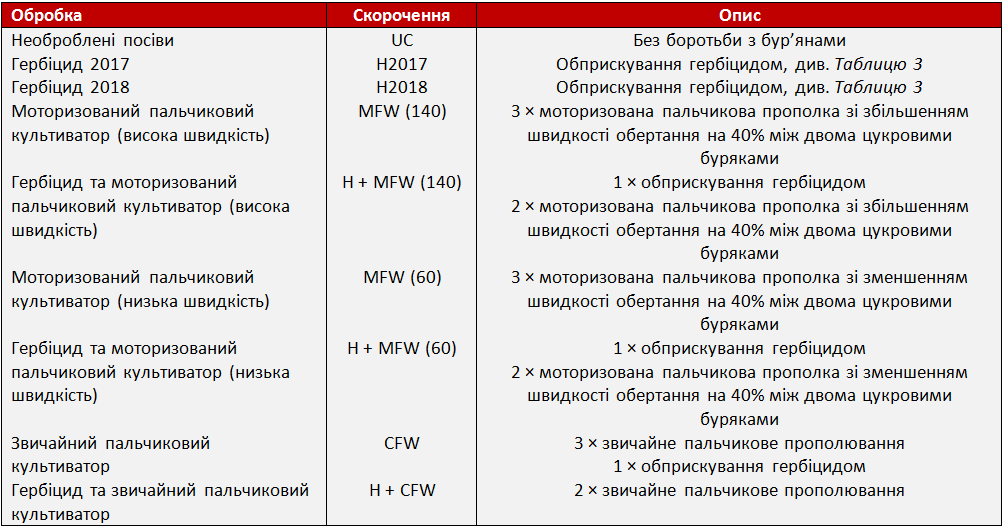
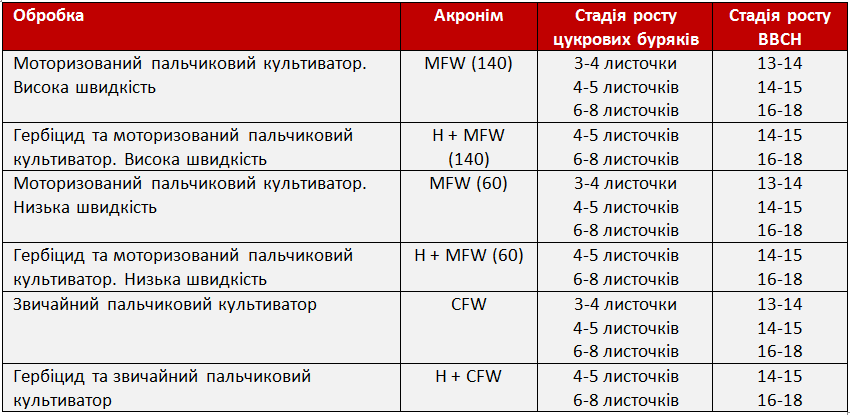
Таблиця 2. Опис обробок на експериментальній ділянці Ihinger Hof у 2017 та 2018 роках. Швидкість руху трактора становила 1 км/год під час обробітку моторизованим пальчиковим культиватором (MFW) та 6 км/год для звичайного пальчикового культиватора (CFW). Номінальна швидкість обертання (100%) MFW відповідала лінійній швидкості 1 км/год.
В обидва роки досліджень цукрові буряки сорту Hannibal висівалися на глибину 3 см сівалкою шириною 3 м (Solitair 8, Lemken, Alpen, Німеччина) із міжряддям 0,5 м. Густота посіву становила 107 тис. насінин на 1 га, відстань між двома рослинами в рядку складала від 18 до 22 см. Розмір ділянки становив 12 м × 3 м. Таким чином, кожна ділянка складалася з шести рядків цукрових буряків, а ширина посівів (3 м) відповідала ширині сівалки (3 м).
Гербіциди та деталі застосування
У Таблиці 3 наведено гербіциди, які використовувалися в експериментах у 2017 та 2018 роках. Під час трьох хіміко-механічних обробок H + MFW (140), H + MFW (60) і H + CFW проводилися одноразові обприскування гербіцидами, зазначеними для фази BBCH 10 цукрових буряків. Через значну густоту бур’янів у 2017 році гербіциди вносилися тричі Н2017 (на фазах BBCH 10, 14 та 18).
У 2018 році для боротьби з бур’янами були необхідні лише дві обробки гербіцидами (BBCH 10 та 14). Внесення гербіциду проводилося за допомогою обприскувача на батарейках (Schachtner, Ludwigsburg, Німеччина). Обприскувач мав ширину 3 м та був оснащений пласкими розпилювальними форсунками (компактні форсунки TWIN із пласким розпилювачем повітря IDKT 120-05, Lechler, Metzingen, Німеччина). Гербіциди вносилися з 300 л води на га з тиском розпилення 200 кПа на відстані 50 см від поверхні землі при швидкості руху 5 км/год.
Таблиця 3. Тип гербіциду та час застосування (BBCH цукрових буряків) на експериментальній ділянці Ihinger Hof у 2017 та 2018 роках
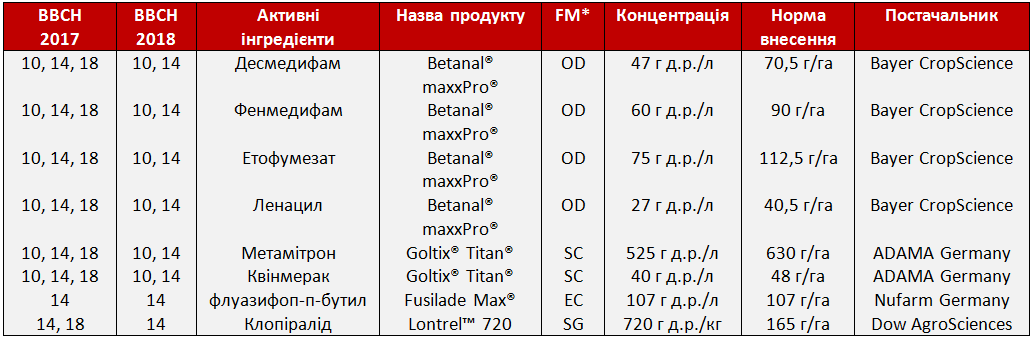
* FM — формулювання; OD — масляна дисперсія; SG — водорозчинні гранули; SC — концентрат суспензії; EC — емульгуючий концентрат; обсяг розпилення: 300 л води на 1 га; кожне застосування гербіциду отримало 0,5 л/га добавки Oleo FC (94% парафінових масел і 6% емульгаторів, ADAMA Німеччина).
Загальне налаштування культиватора
Налаштування механічного обладнання для боротьби з бур’янами (Рис. 1) було засновано на 3-метровій рамі культиватора (Argus, K.U.L.T., Vaihingen a. d. Enz, Німеччина), у поєднанні з системою бічного зміщення Garford Robocrop Side Shift System (Garford Farm Machinery Ltd., Пітерборо, Англія). Система прополювання мала дві камери (Рис. 1а). Першою була камера Гарфорда для загального вирівнювання рядків для виконання міжрядного прополювання. Другою була біспектральна камера, розташована над рядком цукрових буряків і відповідала за внутрішньорядну обробку за допомогою моторизованого пальчикового культиватора (Рис. 1b).
Розпушування між рядками цукрових буряків проводилося за допомогою гусячих лап шириною 20 см, встановлених на паралелограмі. Оскільки кожна ділянка складалася з шести рядків цукрових буряків, для обробки всіх міжрядь однієї ділянки знадобилося сім паралелограмів. Безпечна відстань до рядків цукрових буряків складала 5 см. Для внутрішньорядної прополки використовувалася одна пара звичайних пальчикових культиваторів на ряд цукрових буряків. Перед кожним застосуванням звичайні та моторизовані пальчикові культиватори регулювалися таким чином, щоб забезпечити оптимальний результат прополки.
Налаштування моторизованого пальчикового культиватора
Ідея біспектральної камери в поєднанні з моторизованим пальчиковим культиватором (MFW) полягала в перемиканні між двома швидкостями обертання під час прополювання. Відстань між двома цукровими буряками передбачалося обробляти з іншою швидкістю обертання, ніж міжряддя. У цьому дослідженні було перевірено дві різні інтенсивності обробки (повільну та швидку) смуги між двома цукровими буряками (Рис. 2а). З одного боку, це слугувало перевіркою, чи зможе сенсорна система надійно перемикатися між різними швидкостями, а з іншого боку, чи була різниця в ефективності боротьби з бур’янами між двома швидкостями обертання.
Рис. 1. Налаштування культиватора, використане в експериментах на ділянці Ihinger Hof у 2017 та 2018 роках. Зображення відображає одну ширину ділянки (шість рядків цукрових буряків). 1 = Garford Robocrop, 2 = камера Garford Robocrop для міжрядної прополки, 3 = рама культиватора Argus, 4 = паралелограми з гусячими лапами, 5 = звичайні пальчикові культиватори, 6 = двоспектральна камера для внутрішньорядної прополки (синій колір), 7 = колесо Одометр, 8 = моторизовані пальчикові культиватори (синій колір), 9 і 10 = два центральних рядки цукрових буряків кожної ділянки, які були оброблені моторизованими пальчиковими культиваторами (MFW).
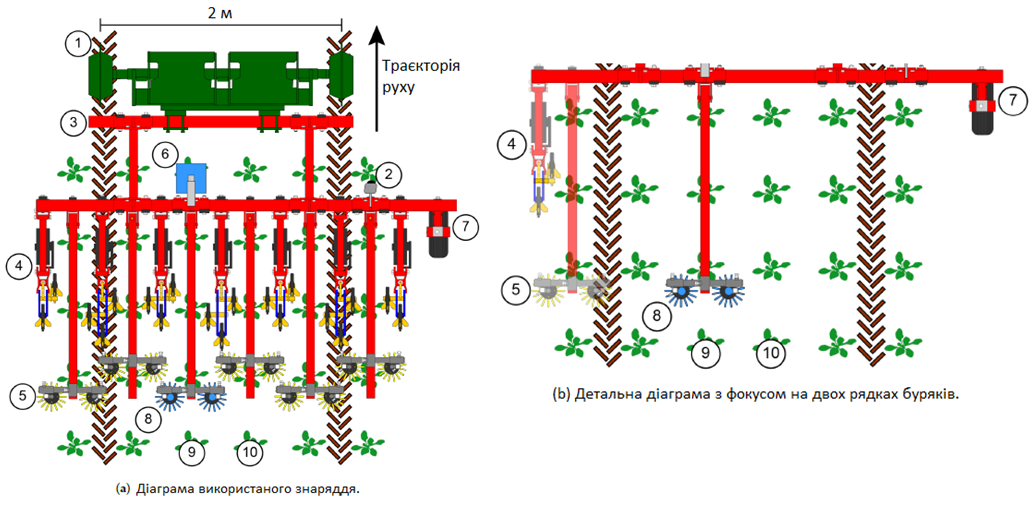
Рис. 2. Звичайний та моторизований пальчикові культиватори, принципи їх використання

Для розробки моторизованих пальчикових культиваторів була модифікована одна пара звичайних пальчикових культиваторів (Рис. 2). Металеві шипи, які зазвичай встановлюються під пальцями культиватора, які притискаються до землі і зазвичай рухають звичайні пальчикові культиватори (CFW), коли трактор рухається вперед, були демонтовані (Рис. 2b). Замість цього був використаний плаский металевий диск для захисту пластикового пальчикового культиватора від тертя об землю. Електродвигун (Bühler Motor GmbH, Німеччина) був встановлений на кожній прополювальній машині.
Металева частина над пальчиковим культиватором була з’єднана з двигунами, і в поєднанні з пласким металевим диском вона забезпечила утримувач для обертання пластикових пальчикових прополювачів (Рис. 2b). Пальчикові прополювачі мали зовнішній діаметр 240 мм, а внутрішній — 120 мм. Оскільки цей прототип ніколи не проходив випробування в польових експериментах, було зібрано лише одну пару моторизованих пальчикових культиваторів і перевірено на ефективність боротьби з бур’янами. Використовувалися двигуни PM12 постійного струму з регульованою напругою. Вони були оснащені двоступінчастою передачею, що забезпечує зниження швидкості 19:1.
Таким чином, кожен двигун забезпечував приблизно 6 кг/м2/с максимального номінального крутного моменту. Максимальна швидкість на ґрунті становила 45 об./хв, коли двигун живився від 24 В постійного струму. Оскільки двигуни приводили в рух двох пальчикові культиватори, вони були розміщені таким чином, що наближалися ліворуч і праворуч від рядка. Таким чином, двигуни були налаштовані на обертання за та проти годинникової стрілки відповідно (Рис. 2а). Двоканальний контролер двигуна, а саме Robotec MDC2460 (Robotec Inc., Скоттсдейл, Аризона, США) відповідав за швидкість та обертальний рух двох двигунів.
Типова швидкість двигунів складала близько 30 об./хв. Таким чином середня прополка (180 мм) досягла лінійної швидкості 1 км/год., яка співпадала зі швидкістю, з якою рухався трактор, і з цього моменту називається номінальною швидкістю (100%). Обертаючись з тією ж швидкістю, що й трактор, моторизований пальчиковий культиватор (MFW) працював безперешкодно, не завдаючи жодної шкоди цукровим бурякам.
Під час використання моторизованого пальчикового культиватора (MFW) (140) та H (гербіцид) + MFW (140) культиватори оберталися зі швидкістю на 40% швидшою, ніж швидкість руху трактора між двома цукровими буряками. У цьому сценарії очікувалося, що пошкодження та видалення бур’янів будуть більшими.
Під час використання моторизованого пальчикового культиватора (MFW) (60) та H (гербіциду) + MFW (60) культиватори оберталися зі швидкістю на 40% повільнішою між двома цукровими буряками, проти номінальної швидкості, застосованої в міжряддях. Таким чином, обертальний рух пальчикового культиватора був повільнішим, ніж швидкість руху трактора (1 км/год.). Це змусило пальчикові культиватори виконувати невеликий ковзний рух.
Проведення механічних обробок
У Таблиці 4 наведено механічні обробки та відповідний час їх застосування за стадією росту BBCH та кількістю повністю розвинених листочків цукрових буряків.
Таблиця 4. Час застосування механічних обробок на дослідній ділянці Ihinger Hof відповідно до кількості розвинених листків і стадії BBCH
Опис сенсорної системи
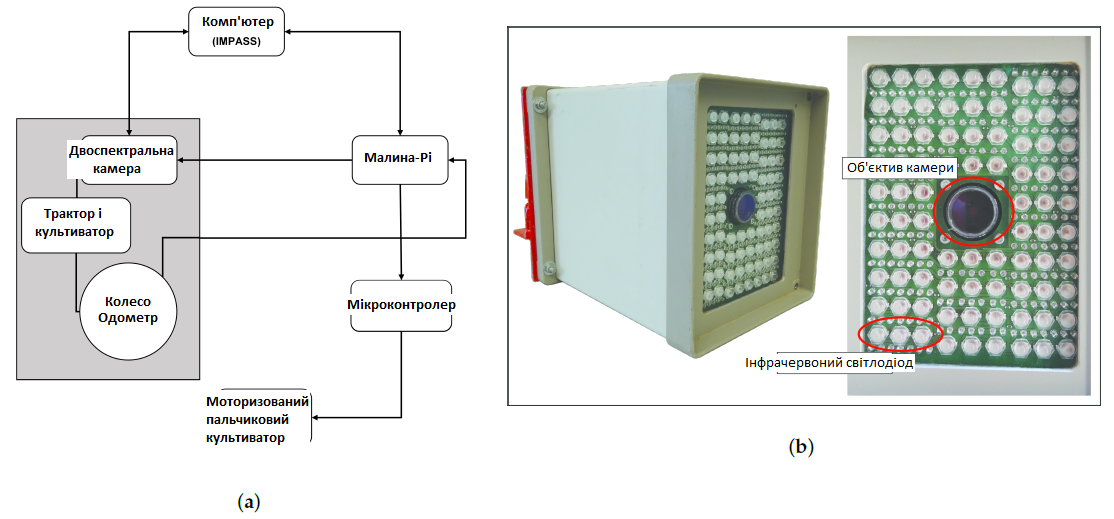
У даному експерименті для розпізнавання рослин використовувалася інфрачервона камера. Датчик представляв собою систему машинного бачення на основі камери з автономним освітленням як червоним, так і інфрачервоним, завдяки чому його можна використовувати навіть вночі або в умовах низького освітлення. Для ідентифікації зображень та класифікації видів рослин була використана модифікована версія програмного забезпечення IMPASS.
Біспектральна камера робила двох піксельні конгруентні зображення в червоному та ближньому інфрачервоному спектрі. Диференціальні зображення (інфрачервоно-червоні) були розраховані на основі двох зображень. Порогове значення було визначено автоматично, створюючи двійкове зображення, де рослинний матеріал позначався «1» (білий), а інші об’єкти — як фон зі значенням «0» (чорний). Завдяки характеристикам відображення різних матеріалів, відмінне зображення не враховувало каміння, солому чи інші органічні речовини.
Крім того, можна досягти сильного контрасту між рослинами та фоном. Для класифікації бур’янів була використана система аналізу зображень на основі даних. У базі даних зберігалися параметри (особливості форми та морфологічні ознаки) різних видів бур’янів та цукрових буряків. Характеристики знайдених на знімках об’єктів порівнювалися з ознаками модельних рослин, що зберігаються в базі даних. Вони були віднесені до відповідного класу за класифікатором мінімальної відстані.
Кожен повністю білий об’єкт на зображенні відокремлювався, і на основі атрибутів розпізнавання форми його класифікували як цукровий буряк або бур’ян. Потім кожне зображення розділяли на смуги приблизно 40 мм для напрямку руху і для кожної смуги приймалося рішення щодо того, чи містить вона цукровий буряк чи бур’ян. Вищезгадана система використовувалася до застосування картографування полів та розпилення. Були внесені зміни для безперервного отримання зображення та кореляції з позиціонуванням моторизованого пальчикового культиватора (MFW).
Рис. 1 і 3а описують налаштування сенсорної системи, використаної в дослідженні. Біспектральну камеру (Рис. 3b) встановили на культиватор спрямованою донизу на одному з двох центральних рядків цукрових буряків. Принцип установки полягав у розділенні внутрішньорядної області на 40 мм смуги. Оскільки відстань між цукровими буряками зазвичай становила близько 180 мм, цей простір мав щонайменше три, а іноді навіть чотири смуги без цукрового буряка, а потім смугу, яка містила цукровий буряк. На смузі з цукровим буряком застосовувалася номінальна швидкість. На решті смуг швидкість регулювалася відповідно до обробки (швидше чи повільніше).
Рис. 3. Інформація про сенсор. (a) Блок-схема, що описує сенсорну систему. (b) Біспектральна камера для внутрішньорядної прополки: лінза оточена інфрачервоними світлодіодами.